 0755-86717293
0755-86717293
 Shenzhen Ideaforauto Technology Co., Ltd.
0755-86717293
Shenzhen Ideaforauto Technology Co., Ltd.
Shenzhen Ideaforauto Technology Co., Ltd.
0755-86717293
Shenzhen Ideaforauto Technology Co., Ltd.
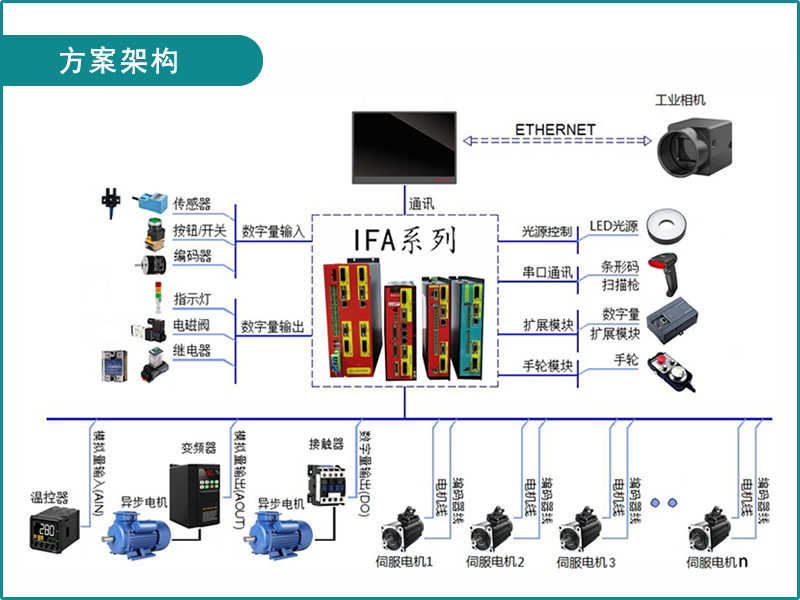
IFA-RS/LS Series drive integrated controller is a highly integrated controller with motion control, servo drive, step drive, logic control PLC and other modules in the general control field. The iFA series controller uses a new distributed control system strategy, which can easily implement large control systems with hundreds of axes through bus expansion. At the same time, it provides flexible and convenient SDK function library and instruction set for further development. IFA-RS/LS drive integrated controller has rich application scenarios, meeting the requirements of high-speed and high-precision control in different scenarios such as 3C electronic processing equipment, chip processing equipment, textile sewing, dispensing, CNC, laser, medical equipment and so on.






| iFA-RS/LS Drive Integrated Controllers | |||||||||||
| 型号 Model | iFA-RS2-L040 | iFA-LS2-L040 | iFA-RS2-H040 | iFA-LS2-H040 | iFA-RS2-H200 | iFA-LS2-H200 | iFA-RS4-H200 | iFA-LS4-H200 | iFA-RS6-H200 | iFA-LS6-H200 | |
| 产品图片 Product Images | |  |  |  |  | ||||||
| 尺寸 Size LxWxH(mm^3) | 55x245x161 | 55x245x161 | 55x245x161 | 55x245x161 | 55x245x161 | 55x245x161 | 105x305x200 | 105x305x200 | 155x305x200 | 155x305x200 | |
| 输入电源 Power Supply | 主电源 Main Power | <48Vdc | 220VAC-15%~+10% 50/60Hz | ||||||||
| Vdc | 1PH/3PH 220VAC | ||||||||||
| 控制电源 Control Power | Vdc | 1PH/3PH 220VAC-15%~+10% 50/60Hz | |||||||||
| 环境 Environment | 工作温度 Operating Temperature | -20°~50° | |||||||||
| 储存温度 Storage Temperature | -40°~60° | ||||||||||
| 工作湿度 Operating Humidity | 20%~80% no condensation | ||||||||||
| 储存湿度 Storage Humidity | 90% and lower no condensation | ||||||||||
| 制动模块 Brake Module | - | - | 外置 External | ||||||||
| 伺服轴数 # of Servo Axis | 2 | 4 | 6 | ||||||||
| 轴额定输出功率 Axis Rated Output Power (kW) | 0.4 | 2 | |||||||||
| 轴额定输出电流 Axis Rated Output Current (A) | 3 | 12 | |||||||||
| 轴最大输出电流 Axis Max Output Current (A) | 10 | 30 | |||||||||
| 电机类型 Motor Type | 伺服 Servo | 伺服 (直线)Servo(Linear) | 伺服 Servo | 伺服 (直线)Servo(Linear) | 伺服 Servo | 伺服 (直线)Servo(Linear) | 伺服 Servo | 伺服 (直线)Servo(Linear) | 伺服 Servo | 伺服 (直线)Servo(Linear) | |
| 电机编码器 Motor Encoder | 增量式/17位绝对值/23位绝对值/Endat/Biss/多摩川/尼康 Incremental/17-bit absolute/23-bit absolute/Endat/Biss/Tamagawa/Nikon | ||||||||||
| 控制模式 Control Mode | 位置、速度、转矩、位置/速度、位置/转矩、速度/转矩、内部转矩、内部速度、内部位置,支持全闭环 Position, velocity, torque, position/velocity, position/torque, velocity/torque, internal torque, internal velocity, internal position, supports full closed-loop | ||||||||||
| 通信方式 Comm. Protocol | Ethernet、P/D、RS485、Ethercat(选配) | ||||||||||
| 数字输入端口 Digital Input Interface | 12 | 24 | |||||||||
| 数字输出端口 Digital Output Interface | 8 | 16 | |||||||||
| 模拟输出端口 Analog Output Interface | - | 2 | |||||||||
| 其他功能端口 Other Interface | 2路PWM输出,2路ABZ脉冲输入(含1路手轮输入通道) 2 PWM output, 2 ABZ pulse input (incl. 1 for handwheel input) | ||||||||||
| 扩展轴 Extended Axis | 支持 Supportable | ||||||||||
| 扩展I/O Extended I/O | 支持 Supportable | ||||||||||
| 监测功能 Monitoring Function | 指令位置、指令速度、指令电流、实际位置、实际速度、实际电流、母线电压、输出电流、IO状态、XY合成轨迹、故障代码等 Command position, command speed, command current, actual position, actual speed, actual current, bus voltage, output current, I/O status, XY composite trajectory, fault codes, etc. | ||||||||||
| 保护功能 Protection Function | 过压、欠压、过流/载、堵转、过热、缺相、超速、超差、制动异常、龙门不同步等 Overvoltage, undervoltage, overcurrent/load, stall, overheat, phase loss, overspeed, deviation exceed, abnormal braking, gantry out of sync, etc. | ||||||||||
| 特性 Characteristic | 平台 Platform | 两轴驱控一体 2-axis controller&driver | 四轴驱控一体 4-axis controller&driver | 六轴驱控一体 6-axis controller&driver | |||||||
| 电流环带宽 Current Loop Bandwidth | >3kHz | ||||||||||
| 同步模式 Synchronization Mode | 多动子、龙门Gantry功能、双轴耦合控制、虚拟轴(选配功能) Multi-mover, Gantry function, dual-axis coupling control, virtual axis (optional feature) | ||||||||||
| 内置运动规划 Internal Motion Planning | 点位, Jog, 直线/圆弧/螺旋插补, 电子齿轮, follow, 龙门双驱, 48种回零方式, DI电平翻转计数, DI上升沿编码器捕获, DO编码器比较输出 Point-to-point, Jog, Linear/ Circular/ Spiral Interpolation, Electronic Gear, Follow, Gantry Dual Drive, 48 Homing Modes, DI Level Flip Count, DI Rising-Edge Encoder Capture, DO Encoder Comparison Output | ||||||||||
| PLC功能 PLC Function | 支持简易PLC功能、通过调试工具配置(选配功能) Supports basic PLC functionality, configurable through debugging tool (optional feature) | ||||||||||
| 自整定 Auto Calibration | 动态刚性自动校正功能、高惯量比负载条件下震动抑制 Dynamic stiffness automatic calibration function, vibration suppression under high inertia load conditions | ||||||||||
| 上位机 Upper PC | PC、标准组态屏、芯科控TP系列 PC, standard configuration screen, TP series (Ideaforauto) | ||||||||||
| 可编程 Programmable | Linux+QT;可作为主站,使用C++/C# SDK包(基础运动控制库+常用工艺支持库+CAD/CAM支持库)开发; 也可以作为PLC或运动控制卡从站,集成行业专用工艺 Linux+QT; can be used as the main station, developed using C++/C# SDK package (basic motion control library + commonly used process support library + CAD/CAM support library); can also be used as a PLC or motion control card slave station, integrating industry-specific processes. | ||||||||||
 0755-86717293
0755-86717293
+86-18926588328
+86-18926588328





关注我们






